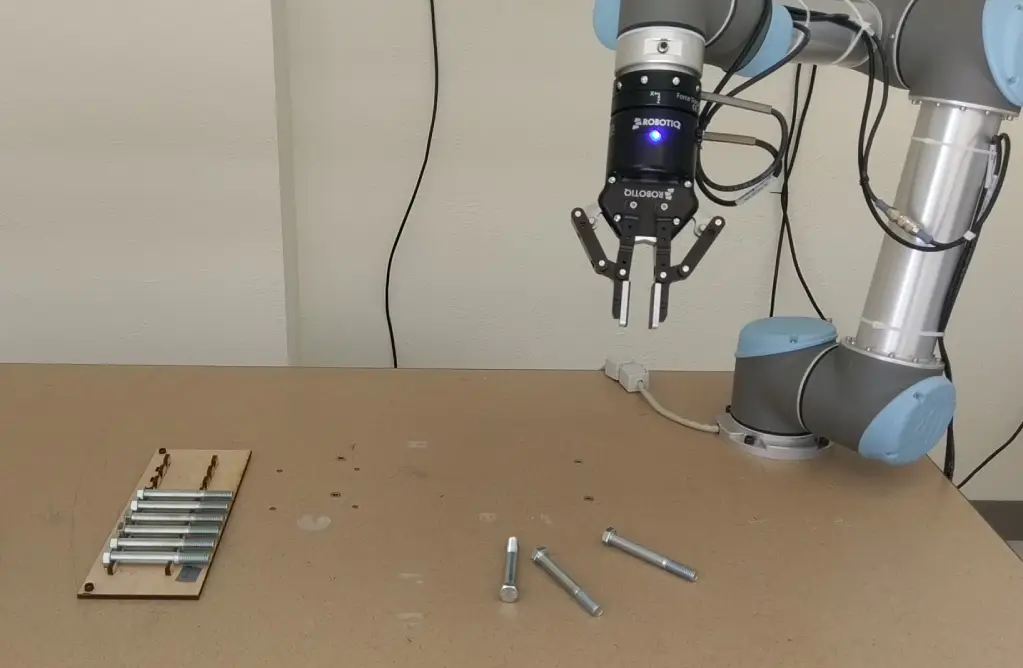
Vision-Based Pick-and-Place
This video demonstrates the advanced automation potential of collaborative robots. We created this vision-based pick-and-place demo in 30 minutes using a CoBot from Universal Robots with end-effector hardware and software from Robotiq. Plug-and-play camera hardware and software allow quick part teaching and design changes for a fast time to production. Robotiq's object identification software uses machine learning to fully automate the pattern recognition process. A user does not need a background in robotics or vision to develop this type of application. One simply photographs the desired object and uses a software wizard to define the selection criteria. CoBot software accomplishes the rest of the finding and gripping of randomly-arranged objects. The Robotiq Wrist Camera is ideal for CoBot pick-and-place industrial applications where objects are not palletized of prearranged.