CoBots with the Sense of Touch
Robot technology is evolving rapidly. For example, force/torque sensors provide a robot with the sense of “touch.” With a collaborative robot (CoBot), touch is combined with intuitive ease-of-use to simplify many applications for the lay person. And remember that CoBots allow people and robots to work together. Here are some things that you can do with a CoBot using the sense of touch:
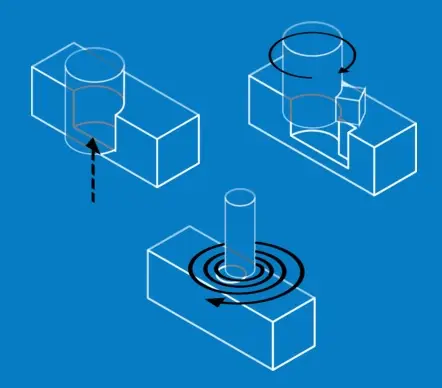
Precise object placement: When loading parts into a fixture for machine tending, the sense of touch is used to find the exact part location. Changes is the position or size of the raw stock material can be automatically corrected by measuring insertion force in the same way that people use the sense of touch.
Controlled force and stiffness: For robotic sanding, the force/torque sensor will control the applied force and stiffness with more precision and repeatability than a person. A person can setup and fine tune a robotic sanding operation, and then use the CoBot to perform the dusty and tedious work of sanding.
Object alignment & insertion: For robotic screwdriving, a spiral search operation is used to perfectly align a screw within a hole to prevent cross-threading. Searching with the sense of touch adjusts for any mechanical drift or errors in the screw or hole location. Also, screw turning can be precisely controlled with the torque sensor to ensure that the screw in not under or over tightened.
Hand-guided path recording: For glue dispensing, the Force CoPilot CoBot app enables the user to: (1) constrain the path to only planar motion, (2) define a complex path by hand movement of the robot arm, and (3) repeat that path at a constant velocity so that the glue is dispensed evenly. A person can use a CoBot to dispense glue more consistently than by hand.